


A modern világban szinte mindenhol körülvesz minket az automatizálás. Gondoljunk csak a háztartási eszközeinkre, az ipari gyártósorokra, az autókra vagy akár a legkomplexebb űreszközökre. Ezek a rendszerek gyakran képesek önállóan működni, fenntartani egy adott állapotot, vagy egy előre meghatározott cél felé haladni anélkül, hogy folyamatos emberi beavatkozásra lenne szükség. Ennek a képességnek a motorja a szabályozás, amelynek egyik legfejlettebb és legelterjedtebb formája a zárt hurkú szabályozórendszer, más néven visszacsatolásos szabályozás.
A zárt hurkú rendszerek a mérnöki tudomány és a technológia sarokkövei, amelyek lehetővé teszik a pontosságot, a stabilitást és az alkalmazkodóképességet. Anélkül, hogy észrevennénk, nap mint nap profitálunk a működésükből: a termosztát, amely fenntartja otthonunk hőmérsékletét, az autó sebességtartó automatikája, vagy a robotkar, amely precízen hegeszt egy gyártósoron, mind zárt hurkú elven működik. Ez a cikk a zárt hurkú szabályozórendszerek mélyére ás, bemutatva definíciójukat, kulcselemeiket, működési elvüket, előnyeiket és hátrányaikat, valamint széles körű alkalmazási területeiket.
A szabályozórendszerek alapjai: nyílt és zárt hurkú rendszerek
Mielőtt belemerülnénk a zárt hurkú rendszerek részleteibe, elengedhetetlen, hogy megértsük a szabályozás alapvető fogalmait, és megkülönböztessük őket a nyílt hurkú megfelelőiktől. A szabályozás lényege, hogy egy folyamat kimenetét egy kívánt értékre, az úgynevezett referenciajelre (vagy alapjelre) állítsuk be és ott is tartsuk.
A nyílt hurkú szabályozórendszerek a legegyszerűbb vezérlési formát képviselik. Ezekben a rendszerekben a beavatkozás mértéke előre meghatározott, és nem függ a folyamat aktuális kimenetétől. Azaz, nincs visszacsatolás arról, hogy a beavatkozás elérte-e a kívánt hatást. Gondoljunk egy hagyományos kenyérpirítóra: beállítjuk a pirítás idejét, és a gép lejárta után kikapcsol, függetlenül attól, hogy a kenyér valóban elérte-e a kívánt pirultsági fokot. Ugyanígy, egy mosógép is nyílt hurkú rendszerként működhet, ha a programot előre beállítjuk, és az végigfut, anélkül, hogy ellenőrizné a ruhák tisztaságát.
A nyílt hurkú rendszerek jellemzője az egyszerűség és az alacsony költség. Alkalmazhatók olyan esetekben, ahol a folyamat viszonylag stabil, a külső zavaró tényezők elhanyagolhatóak, és a kimenet pontos értéke nem kritikus. Azonban jelentős korlátaik vannak: nem képesek kompenzálni a külső zavaró hatásokat (pl. feszültségingadozás, terhelésváltozás), és nem tudják korrigálni a rendszer belső hibáit vagy változásait (pl. alkatrészek öregedése). Emiatt a pontosságuk és megbízhatóságuk gyakran elégtelen a modern ipari vagy technológiai alkalmazásokban.
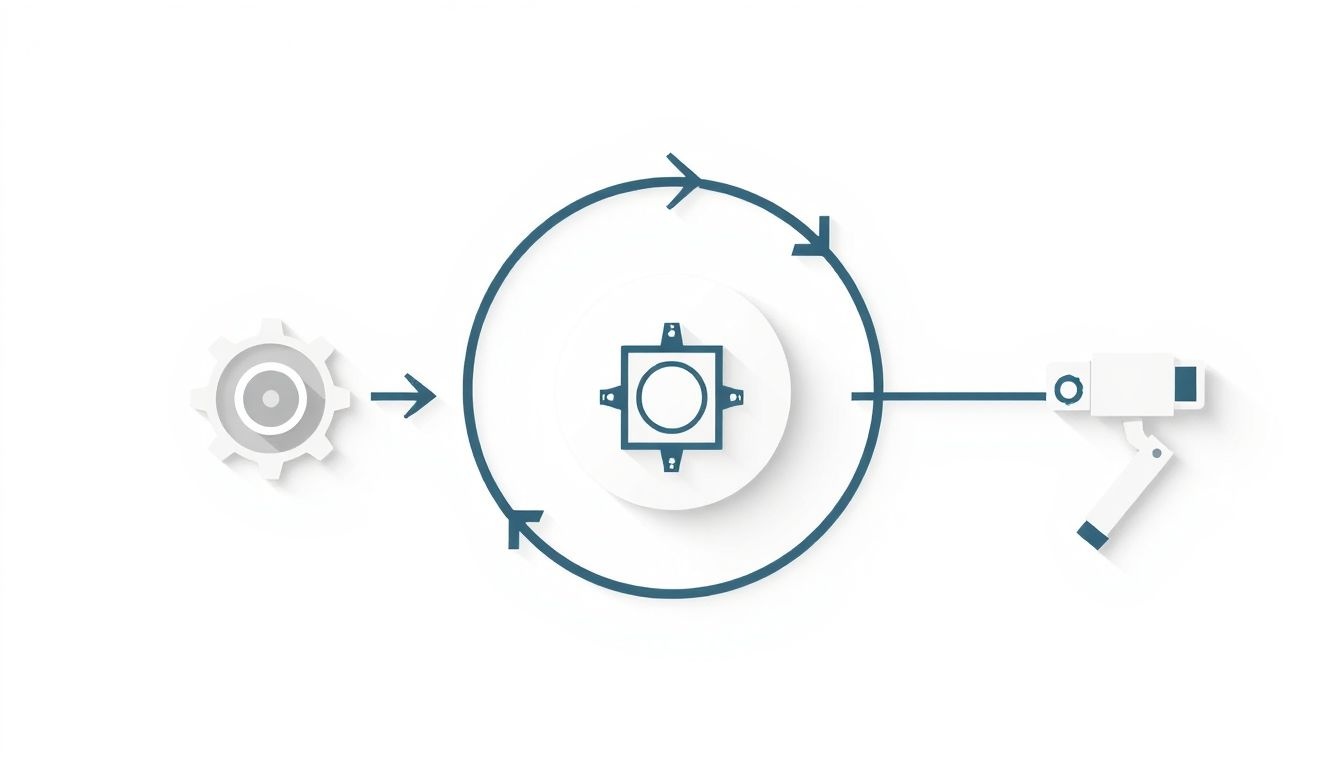
Itt jön a képbe a zárt hurkú szabályozórendszer. Ez a rendszer egy alapvető, de rendkívül erőteljes koncepcióra épül: a visszacsatolásra. A zárt hurkú rendszer folyamatosan méri a szabályozott mennyiség aktuális értékét, összehasonlítja azt a kívánt referenciajellel, és a különbség alapján beavatkozik a folyamatba, hogy a mért érték minél közelebb kerüljön az alapjelhez. Ez a folyamatos önkorrekció teszi lehetővé a nagy pontosságot és a zavaró hatásokkal szembeni ellenállást.
Képzeljünk el egy modern sütőt. Beállítjuk a kívánt hőmérsékletet (referenciajel). A sütő belsejében lévő szenzor (hőmérő) folyamatosan méri az aktuális hőmérsékletet. Ha az alacsonyabb, mint a beállított érték, a szabályozó bekapcsolja a fűtőelemet (aktuátor). Amint a hőmérséklet eléri a kívánt szintet, a szabályozó lekapcsolja, vagy csökkenti a fűtést. Ez a folyamatos mérés és beavatkozás biztosítja, hogy a sütő hőmérséklete stabilan a beállított értéken maradjon, még akkor is, ha kinyitjuk az ajtaját, és hideg levegő áramlik be. Ez a körfolyamat, ahol a kimenet hatással van a bemenetre, a „zárt hurok” lényege.
A zárt hurkú szabályozórendszer definíciója és működési elve
A zárt hurkú szabályozórendszer, vagy angolul closed-loop control system, egy olyan rendszer, amelyben a szabályozott folyamat kimenetét folyamatosan mérik, és ezt a mérési eredményt visszacsatolják (feedback) a bemenetre. A visszacsatolt érték összehasonlításra kerül egy kívánt értékkel, az úgynevezett referenciajellel vagy alapjellel. A kettő közötti különbséget, a hibajelet, egy szabályozó elem dolgozza fel, amely a hibajel alapján beavatkozik a folyamatba, hogy minimalizálja a különbséget, és a kimenetet a referenciajelhez közelítse.
Ennek a működési elvnek a központi eleme a visszacsatolás. Ez a visszacsatolási hurok biztosítja, hogy a rendszer önkorrigáló legyen. Ha a rendszer kimenete eltér a kívánt értéktől – legyen az egy külső zavaró hatás, mint például egy hirtelen terhelésváltozás egy motoron, vagy egy belső, nem kívánt változás, mint egy alkatrész elhasználódása –, a visszacsatolás révén a rendszer azonnal érzékeli ezt az eltérést, és beavatkozik annak korrigálására. Ez a folyamatos monitorozás és korrekció teszi a zárt hurkú rendszereket rendkívül pontossá és robosztussá.
A működési elv tehát egy ciklikus folyamatként írható le:
- A felhasználó vagy egy másik rendszer beállítja a referenciajelet (pl. 22 °C szobahőmérséklet).
- A szenzor (pl. hőmérő) megméri a szabályozott folyamat aktuális kimenetét (pl. 20 °C aktuális szobahőmérséklet).
- A mért érték visszacsatolásra kerül a rendszer bemenetére, ahol összehasonlítják a referenciajellel. Ebből adódik a hibajel (22 °C – 20 °C = 2 °C).
- A szabályozó (pl. termosztát vezérlője) a hibajel alapján dönt a szükséges beavatkozásról (pl. bekapcsolja a fűtést).
- Az aktuátor (pl. fűtőtest) végrehajtja a szabályozó utasítását, befolyásolva ezzel a szabályozott folyamatot (pl. elkezdi fűteni a szobát).
- A folyamat kimenete megváltozik, amit a szenzor újra mér, és a ciklus ismétlődik, amíg a hibajel minimálisra nem csökken, vagy nullává nem válik.
Ez a folyamatosan ismétlődő kör biztosítja, hogy a rendszer dinamikusan reagáljon a változásokra, és a kimenet a lehető legközelebb maradjon a kívánt referenciaértékhez.
A zárt hurkú szabályozórendszer lényege az önkorrekció: a rendszer folyamatosan figyeli saját teljesítményét, és automatikusan beavatkozik, hogy fenntartsa a kívánt állapotot, függetlenül a külső zavaró tényezőktől.
A zárt hurkú szabályozórendszer kulcselemei
A zárt hurkú szabályozórendszerek bonyolultnak tűnhetnek, de alapvetően néhány jól elkülöníthető funkcionális egységből épülnek fel, amelyek harmonikus együttműködése biztosítja a stabil és pontos működést. Ezek az elemek alkotják a visszacsatolási hurkot.
Referenciajel (Setpoint)
A referenciajel, más néven alapjel vagy beállított érték, az a kívánt érték, amelyet a szabályozott rendszer kimenetén el szeretnénk érni és fenntartani. Ez az érték lehet állandó (pl. egy termosztát 22 °C-ra van beállítva), vagy változó (pl. egy robotkar mozgási pályája). A referenciajel a szabályozórendszer célja, az a target, amihez a rendszer igyekszik igazodni. A felhasználó vagy egy felsőbb szintű vezérlőrendszer adja meg ezt az értéket.
Fontos megérteni, hogy a referenciajel a rendszer „kívánsága”. Ha például egy autó sebességtartó automatikáját 130 km/h-ra állítjuk, ez a 130 km/h a referenciajel. A rendszer feladata lesz, hogy a mért sebességet ehhez az értékhez közelítse és ott tartsa, függetlenül az emelkedőktől, lejtőktől vagy a szél ellenállásától.
Szenzor (Érzékelő)
A szenzor, vagy érzékelő, a zárt hurkú rendszer „szeme” vagy „füle”. Feladata, hogy folyamatosan és pontosan mérje a szabályozott folyamat aktuális kimeneti értékét. A szenzorok átalakítják a fizikai mennyiségeket (pl. hőmérséklet, nyomás, sebesség, pozíció) elektromos jelekké, amelyeket a szabályozó képes feldolgozni.
A szenzorok minősége kritikus a rendszer teljesítménye szempontjából. Egy pontatlan vagy zajos szenzor hibás visszacsatolást ad, ami rossz szabályozáshoz vezethet. Példák szenzorokra: hőelemek, termisztorok (hőmérséklet mérésére), nyomásérzékelők, fordulatszámmérők, optikai érzékelők, távolságérzékelők, gyorsulásmérők. A megfelelő szenzor kiválasztása nagyban függ a szabályozott mennyiségtől és a szükséges pontosságtól.
Hibajel (Error Signal)
A hibajel az a kritikus információ, amely a szabályozó döntéseinek alapját képezi. Ez a referenciajel és a szenzor által mért aktuális kimeneti érték közötti különbség. Matematikailag kifejezve: Hibajel = Referenciajel – Mért kimeneti érték.
Ha a hibajel pozitív, az azt jelenti, hogy a mért érték alacsonyabb a kívántnál, tehát a szabályozónak növelnie kell a beavatkozást. Ha a hibajel negatív, a mért érték magasabb a kívántnál, tehát a szabályozónak csökkentenie kell a beavatkozást. Ha a hibajel nulla, az azt jelenti, hogy a rendszer elérte a kívánt állapotot, és ideális esetben a szabályozó nem avatkozik be tovább, vagy csak annyira, hogy fenntartsa az egyensúlyt. A hibajel minimalizálása a zárt hurkú szabályozás elsődleges célja.
Szabályozó (Controller)
A szabályozó a zárt hurkú rendszer „agya”. Feladata, hogy a hibajel alapján meghatározza a szükséges beavatkozást, amelyet az aktuátor majd végrehajt. A szabályozó algoritmusok rendkívül változatosak lehetnek, a legegyszerűbb be-ki kapcsoló szabályozóktól (mint egy alap termosztát) a komplex, adaptív és prediktív rendszerekig. A leggyakrabban használt szabályozó algoritmus a PID szabályozó.
A PID (Proporcionális-Integráló-Differenciáló) szabályozó a mérnöki gyakorlatban az egyik legelterjedtebb szabályozási algoritmus. Három tagból áll, amelyek mindegyike másképp reagál a hibajelre:
- P (Proporcionális) tag: Ez a tag a hibajel aktuális értékével arányosan avatkozik be. Minél nagyobb a hibajel, annál nagyobb a korrekció. Gyorsan reagál, de önmagában gyakran hagy egy állandósult hibát (offsetet).
- I (Integráló) tag: Ez a tag a hibajel időbeli összegét (integrálját) veszi figyelembe. Fő feladata az állandósult hiba megszüntetése. Lassan, de hosszantartóan hat, segítve a rendszernek elérni a referenciajelet.
- D (Differenciáló) tag: Ez a tag a hibajel változási sebességére (differenciáljára) reagál. Előre látja a hibajel jövőbeli viselkedését, és segít csillapítani a rendszer oszcillációit, ezzel javítva a stabilitást és a reakcióidőt.
A PID szabályozó paramétereinek (Kp, Ki, Kd) hangolása (tuningja) kulcsfontosságú a rendszer optimális működéséhez. A rosszul hangolt PID szabályozó instabil rendszert, lassú reakciót vagy túllövést eredményezhet.
Aktuátor (Végrehajtó elem)
Az aktuátor, vagy végrehajtó elem, a szabályozó utasításait fizikai mozgássá vagy energiává alakítja, beavatkozva ezzel a szabályozott folyamatba. Ez az a komponens, amely ténylegesen befolyásolja a rendszer kimenetét a szabályozó által meghatározott módon.
Az aktuátorok típusa rendkívül változatos, és a szabályozott folyamattól függ. Példák:
- Elektromos motorok: Szivattyúk, ventilátorok, robotkarok, járművek hajtására.
- Szelepek: Folyadékok vagy gázok áramlásának szabályozására (pl. fűtési rendszerekben, vegyipari üzemekben).
- Fűtőelemek: Hőmérséklet szabályozására (pl. sütők, kazánok).
- Hidraulikus vagy pneumatikus hengerek: Nagy erőkifejtést igénylő mozgásokhoz (pl. ipari présgépek).
Az aktuátoroknak képesnek kell lenniük a szabályozó által kiadott jelek pontos és gyors végrehajtására, hogy a rendszer hatékonyan működhessen.
Szabályozott folyamat (Plant)
A szabályozott folyamat, vagy angolul plant, maga az a fizikai rendszer vagy jelenség, amelyet szabályozni szeretnénk. Ez lehet egy egyszerű fűtőtest, egy komplex vegyi reaktor, egy robotkar, egy repülőgép, vagy akár az emberi test vércukorszintje.
A folyamat jellemzői – mint például a tehetetlenség, a késleltetés, a linearitás vagy a nem-linearitás – alapvetően befolyásolják a szabályozórendszer tervezését és teljesítményét. Egy jól megértett és modellezett folyamat megkönnyíti a szabályozó tervezését és hangolását, míg egy komplex, nehezen modellezhető folyamat nagyobb kihívást jelenthet.
A zárt hurkú szabályozás automatikus működése lépésről lépésre
A zárt hurkú szabályozórendszer automatikus működése egy elegáns, ciklikus folyamat, amely folyamatosan igazítja a rendszer kimenetét a kívánt értékhez. Nézzük meg ezt a folyamatot részletesebben, lépésről lépésre, egy hipotetikus példán keresztül, ahol egy folyadék hőmérsékletét szabályozzuk egy tartályban.
1. Referenciajel beállítása:
A folyamat azzal kezdődik, hogy beállítjuk a kívánt hőmérsékletet, mondjuk 50 °C-ot. Ez az alapjel (referenciajel), ami a rendszer célja. A szabályozó tudja, hogy a tartályban lévő folyadék hőmérsékletét ehhez az értékhez kell közelítenie és ott kell tartania.
2. Folyamat mérése:
Egy hőmérséklet-érzékelő (szenzor), például egy hőelem, folyamatosan méri a folyadék aktuális hőmérsékletét a tartályban. Tegyük fel, hogy a kezdeti hőmérséklet 20 °C. Ez a mért érték lesz a rendszer visszacsatolt kimenete.
3. Hibajel képzése:
A mért hőmérséklet (20 °C) a szabályozóhoz kerül, ahol összehasonlításra kerül a referenciajellel (50 °C). A különbség a hibajel: 50 °C – 20 °C = 30 °C. Ez a pozitív hibajel azt jelzi, hogy a folyadék túl hideg, és fűtésre van szükség.
4. Szabályozó beavatkozása:
A szabályozó (például egy PID algoritmus) feldolgozza a 30 °C-os hibajelet. Az algoritmus a hibajel nagysága, időbeli változása és integrálja alapján kiszámítja, hogy mekkora fűtési teljesítményre van szükség a hőmérséklet emeléséhez. Ha a hibajel nagy, a szabályozó nagy beavatkozást generál. Ha a hibajel kicsi, akkor kisebbet.
5. Aktuátor működése:
A szabályozó által generált beavatkozási jel eljut az aktuátorhoz, ami ebben az esetben egy elektromos fűtőelem. Az aktuátor a szabályozó utasításainak megfelelően bekapcsol, és elkezdi melegíteni a folyadékot a tartályban. Minél nagyobb a szabályozó által kiadott jel, annál intenzívebben fűt az aktuátor.
6. Visszacsatolás és ciklikus működés:
Amint a fűtőelem működni kezd, a folyadék hőmérséklete emelkedni kezd. A szenzor folyamatosan méri ezt az emelkedést (pl. 20 °C-ról 25 °C-ra, majd 30 °C-ra stb.). Az újonnan mért érték ismét visszacsatolódik a szabályozóhoz. A hibajel ennek megfelelően csökken (50 °C – 25 °C = 25 °C, majd 50 °C – 30 °C = 20 °C). A szabályozó a csökkenő hibajel alapján csökkenti a fűtőelem teljesítményét, hogy elkerülje a túllövést. Ez a ciklus addig ismétlődik, amíg a mért hőmérséklet megközelíti az 50 °C-ot, és a hibajel minimálisra, vagy nullára nem csökken. Ekkor a fűtőelem csak annyi energiát szolgáltat, amennyi a hőveszteség pótlásához szükséges az 50 °C fenntartásához.
Ez a folyamatosan zajló, önkorrigáló hurok biztosítja, hogy a rendszer dinamikusan reagáljon a változásokra, például ha a tartály ajtaját kinyitják, és a hőmérséklet hirtelen leesik. A szenzor azonnal érzékeli az eltérést, a hibajel megnő, a szabályozó utasítja a fűtőelemet, hogy fokozza a fűtést, és a rendszer gyorsan visszaáll a kívánt hőmérsékletre. Ez a dinamikus alkalmazkodás a zárt hurkú rendszerek legfontosabb jellemzője.
A zárt hurkú szabályozórendszerek előnyei
A zárt hurkú szabályozórendszerek számos olyan előnnyel rendelkeznek, amelyek miatt a legtöbb modern automatizálási és vezérlési feladatban ezeket alkalmazzák. Ezek az előnyök teszik lehetővé a precíz, megbízható és hatékony működést a legkülönfélébb iparágakban.
1. Pontosság és stabilitás:
Ez az egyik legfőbb előny. A folyamatos visszacsatolásnak köszönhetően a rendszer folyamatosan korrigálja magát, minimalizálva a referenciajel és a tényleges kimenet közötti eltérést. Ez rendkívül magas pontosságot eredményez, ami kritikus számos alkalmazásban, például precíziós gyártásban vagy orvosi eszközökben. Emellett a zárt hurok segít fenntartani a rendszer stabilitását, megakadályozva a nem kívánt oszcillációkat vagy a kontrollálatlan működést.
2. Zavaró hatások kompenzálása:
A zárt hurkú rendszerek kiválóan képesek kezelni a külső zavaró hatásokat. Ha egy külső tényező, például egy hirtelen terhelésváltozás, szél, hőmérséklet-ingadozás vagy zaj megpróbálja eltéríteni a rendszert a kívánt állapotától, a visszacsatolás azonnal érzékeli ezt az eltérést, és a szabályozó beavatkozik, hogy ellensúlyozza a zavaró hatást. Ez a képesség teszi őket rendkívül robusztussá a valós környezeti kihívásokkal szemben.
3. Robusztusság a változásokkal szemben:
A rendszerek belső paraméterei idővel változhatnak az alkatrészek öregedése, kopása vagy más tényezők miatt. A zárt hurkú rendszerek kevésbé érzékenyek ezekre a belső változásokra, mint a nyílt hurkúak. Mivel a visszacsatolás a tényleges kimenetre fókuszál, képes kompenzálni a rendszer dinamikájának lassú eltolódását, így hosszabb ideig megbízhatóan működhetnek karbantartás nélkül.
4. Automatizálás és emberi beavatkozás csökkentése:
A zárt hurkú rendszerek alapvetően automatikusak. Miután beállítottuk a referenciajelet és a szabályozó paramétereit, a rendszer önállóan képes működni, fenntartani a kívánt állapotot, és reagálni a változásokra. Ez jelentősen csökkenti az emberi felügyelet és beavatkozás szükségességét, felszabadítva az embereket a monoton vagy veszélyes feladatok alól, és lehetővé téve a 24/7-es működést.
5. Energiahatékonyság és erőforrás-optimalizálás:
A pontos szabályozás gyakran vezet energiahatékonysághoz. Például egy zárt hurkú fűtési rendszer csak annyi energiát használ, amennyi a kívánt hőmérséklet fenntartásához szükséges, elkerülve a túlfűtést vagy a felesleges energiafelhasználást. Hasonlóképpen, egy zárt hurkú motorvezérlés optimalizálhatja az üzemanyag-fogyasztást, míg egy gyártósoron a pontos pozícióvezérlés minimalizálhatja az anyagpazarlást.
6. Jobb dinamikus válasz:
A zárt hurkú rendszerek általában gyorsabban és pontosabban reagálnak a referenciajel változásaira vagy a zavaró hatásokra. A szabályozó képes proaktívan vagy reaktívan beavatkozni, hogy a rendszer a lehető leggyorsabban elérje a kívánt állapotot, minimális túllövéssel vagy oszcillációval. Ez különösen fontos olyan alkalmazásokban, ahol a gyors és stabil átmenetek kulcsfontosságúak, mint például a robotikában vagy a repülésirányításban.
Ezek az előnyök teszik a zárt hurkú szabályozórendszereket a modern technológia alapköveivé, lehetővé téve olyan komplex rendszerek működtetését, amelyek emberi beavatkozás nélkül is megbízhatóan és pontosan teljesítenek.
A zárt hurkú szabályozórendszerek kihívásai és hátrányai
Bár a zárt hurkú szabályozórendszerek rendkívül hatékonyak és sokoldalúak, nem mentesek a kihívásoktól és hátrányoktól sem. Fontos ezeket is figyelembe venni a rendszer tervezésekor és kiválasztásakor, hogy elkerüljük a potenciális problémákat.
1. Komplexitás és tervezési nehézségek:
A zárt hurkú rendszerek tervezése és implementációja lényegesen összetettebb, mint a nyílt hurkú rendszereké. Szükség van szenzorokra, visszacsatolási útra, egy komplexebb szabályozó algoritmusra, és gyakran fejlettebb aktuátorokra. A rendszer minden elemének megfelelő kiválasztása, integrálása és a szabályozó paramétereinek (pl. PID tagok) precíz hangolása komoly szakértelmet igényel. A nem megfelelő tervezés instabil vagy rosszul működő rendszert eredményezhet.
2. Költségek:
A megnövekedett komplexitás és az extra komponensek (szenzorok, fejlettebb szabályozók, precízebb aktuátorok) miatt a zárt hurkú rendszerek drágábbak lehetnek, mint a nyílt hurkú társaik. A kezdeti befektetés magasabb lehet, és a karbantartás is speciálisabb tudást igényelhet. Ezért kisebb, kevésbé kritikus alkalmazások esetén a nyílt hurkú megoldás gazdaságosabb lehet.
3. Instabilitás kockázata:
A visszacsatolás, bár alapvetően előnyös, egyben a zárt hurkú rendszerek instabilitásának fő oka is lehet. Ha a szabályozó túl agresszíven reagál, vagy a rendszer dinamikája nem megfelelően van kezelve, a rendszer oszcillációba, vagy akár kontrollálatlan, növekvő amplitúdójú lengésekbe kezdhet. Ez a „túlszabályozás” súlyos károkat okozhat a berendezésekben, vagy veszélyeztetheti a folyamat biztonságát. A stabilitás elemzése és biztosítása kulcsfontosságú tervezési feladat.
A zárt hurkú szabályozás ereje a visszacsatolásban rejlik, de éppen ez a visszacsatolás teheti instabillá a rendszert, ha a tervezés vagy a hangolás nem kellően precíz.
4. Szenzorhibák érzékenysége:
A zárt hurkú rendszer teljes mértékben a szenzorok pontosságára és megbízhatóságára támaszkodik. Ha a szenzor meghibásodik, pontatlanul mér, vagy zajos jelet ad, az egész rendszer hibásan fog működni. Egy hibás szenzor rossz visszacsatolási információt szolgáltat, ami alapján a szabályozó hibásan avatkozik be, és a rendszer eltérhet a kívánt állapottól, vagy akár instabillá is válhat. Éppen ezért a szenzorok redundanciája és hibatűrő képessége gyakran kritikus tervezési szempont.
5. Lassú reakcióidő (bizonyos esetekben):
Bár a zárt hurkú rendszerek általában gyorsabb dinamikus választ adnak, mint a nyílt hurkúak, bizonyos esetekben a visszacsatolási hurokban lévő késleltetések (pl. a szenzor mérésének késése, az aktuátor lassú reakciója, vagy a folyamat inherent tehetetlensége) korlátozhatják a rendszer sebességét. Túl nagy késleltetés esetén a szabályozó „túl későn” avatkozik be, ami oszcillációkhoz vagy lassú konvergenciához vezethet. Ezért a rendszer dinamikájának és a késleltetéseknek a pontos ismerete elengedhetetlen a szabályozó tervezésénél.
6. Zajproblémák:
A szenzorok által mért jelek gyakran tartalmaznak zajt. Mivel a zárt hurkú rendszer folyamatosan reagál a visszacsatolt jelre, a zaj felerősödhet, és nem kívánt oszcillációkat vagy „remegést” okozhat a rendszer kimenetén. Ezért gyakran szükség van zajszűrésre a szenzorjeleken, ami tovább növeli a rendszer komplexitását és költségét.
Ezen kihívások ellenére a zárt hurkú szabályozás előnyei sok esetben messze felülmúlják a hátrányokat, különösen ott, ahol a pontosság, a stabilitás és az automatikus alkalmazkodás elengedhetetlen. A modern tervezési módszerek és technológiák folyamatosan segítenek ezeket a hátrányokat minimalizálni.
Nyílt és zárt hurkú rendszerek összehasonlítása
A szabályozástechnika alapvető megkülönböztetése a nyílt és zárt hurkú rendszerek között húzódik. Mindkét típusnak megvannak a maga előnyei és hátrányai, és az alkalmazási terület határozza meg, hogy melyik a megfelelő választás. Az alábbi táblázat összefoglalja a legfontosabb különbségeket.
| Jellemző | Nyílt hurkú szabályozórendszer | Zárt hurkú szabályozórendszer |
|---|---|---|
| Működési elv | A beavatkozás előre meghatározott, nem függ a kimenettől. Nincs visszacsatolás. | A beavatkozás a mért kimenet és a referenciajel közötti különbségen alapul. Folyamatos visszacsatolás. |
| Komplexitás | Egyszerűbb felépítés, kevesebb komponens. | Komplexebb felépítés, szenzorok, szabályozó, visszacsatolási hurok. |
| Költség | Általában alacsonyabb. | Általában magasabb. |
| Pontosság | Alacsonyabb, mivel nem korrigálja a hibákat. | Magasabb, folyamatosan minimalizálja a hibajelet. |
| Stabilitás | Általában stabil, nem hajlamos oszcillációra, ha a folyamat maga stabil. | Potenciálisan instabillá válhat, ha rosszul van tervezve vagy hangolva. |
| Zavaró hatások kezelése | Nem képes kompenzálni a külső zavaró hatásokat. | Kiválóan kompenzálja a külső zavaró hatásokat. |
| Rendszerparaméterek változása | Érzékeny a belső paraméterek változására (pl. alkatrészöregedés). | Robusztusabb a belső paraméterek változásaival szemben. |
| Visszacsatolás | Nincs. | Van. |
| Példák | Kenyérpirító, régi mosógép, egyszerű időzítővel vezérelt öntözőrendszer. | Termosztát, sebességtartó automatika, robotkar, modern fűtési rendszer. |
Mikor melyiket érdemes választani?
A nyílt hurkú rendszerek akkor ideálisak, ha:
- A szabályozott folyamat viszonylag egyszerű és jól ismert.
- A külső zavaró hatások minimálisak vagy előre kiszámíthatók.
- A kimenet pontossága nem kritikus, és elfogadhatóak kisebb eltérések.
- Az alacsony költség és az egyszerűség a fő szempont.
A zárt hurkú rendszerek akkor szükségesek, ha:
- A kimenet rendkívül pontos és stabil értékét kell fenntartani.
- A külső zavaró hatások jelentősek és változékonyak.
- A rendszernek alkalmazkodnia kell a belső paraméterek változásaihoz.
- A biztonság vagy a teljesítmény kritikus tényező.
- Az emberi beavatkozást minimalizálni kell, és automatikus működésre van szükség.
A modern technológia fejlődésével a zárt hurkú rendszerek egyre elterjedtebbé válnak, köszönhetően az egyre olcsóbb szenzoroknak és a nagyobb számítási teljesítménynek, amelyek lehetővé teszik komplex szabályozó algoritmusok valós idejű futtatását.
Alkalmazási területek: hol találkozunk zárt hurkú szabályozással?
A zárt hurkú szabályozórendszerek rendkívül széles körben alkalmazhatók, és szinte minden modern technológiai területen megtalálhatók. Az automatizálás és a precíziós vezérlés iránti igény folyamatosan növeli a jelentőségüket. Nézzünk meg néhány kiemelt alkalmazási területet.
Ipari automatizálás és gyártás
Az iparban a zárt hurkú szabályozás alapvető a hatékonyság, a minőség és a biztonság szempontjából.
- Robotika: A robotkarok mozgásának, pozíciójának, sebességének és erejének precíz vezérlése zárt hurkú rendszereken alapul. Szenzorok (pl. enkóderek) mérik a kar aktuális pozícióját, és a szabályozó korrigálja a motorok működését, hogy a robot pontosan elvégezze a feladatot (hegesztés, festés, összeszerelés).
- Gyártósorok: A futószalagok sebességének, a hőkezelő kemencék hőmérsékletének, a folyadékok áramlási sebességének vagy a nyomás értékének fenntartása mind zárt hurkú szabályozással történik. Ez biztosítja a termékek állandó minőségét és a gyártási folyamat stabilitását.
- Minőségellenőrzés: Például egy papírgyárban a papírlap vastagságának vagy nedvességtartalmának folyamatos mérése és a gyártási paraméterek azonnali korrigálása zárt hurkú elven működik, garantálva a termék specifikációinak való megfelelést.
Járműipar
A modern autók tele vannak zárt hurkú rendszerekkel, amelyek növelik a biztonságot, a kényelmet és a hatékonyságot.
- Sebességtartó automatika (Tempomat): A vezető beállítja a kívánt sebességet (referenciajel). A szenzorok mérik az autó aktuális sebességét, és a szabályozó a motor teljesítményének vagy a fékeknek a befolyásolásával tartja a beállított sebességet, függetlenül az útviszonyoktól (emelkedő, lejtő).
- Blokkolásgátló rendszer (ABS): Vészfékezéskor az ABS figyeli az egyes kerekek fordulatszámát. Ha egy kerék blokkolni kezd, a rendszer pillanatokra csökkenti a féknyomást az adott keréken, majd újra növeli. Ez a gyors, ismétlődő zárt hurkú szabályozás megakadályozza a kerék blokkolását, és fenntartja az irányíthatóságot.
- Elektronikus stabilitásvezérlő (ESP): Az ESP szenzorai mérik a jármű mozgását (oldalirányú gyorsulás, fordulási sebesség) és összehasonlítják a vezető szándékával (kormányállás). Ha eltérést észlel, szelektíven fékezi az egyes kerekeket, és/vagy csökkenti a motor teljesítményét, hogy megakadályozza a megcsúszást.
- Motorvezérlés: Az üzemanyag-befecskendezés, a gyújtás időzítése és a kipufogógáz-visszavezetés (EGR) mind zárt hurkú rendszerekkel optimalizálódik az optimális teljesítmény, üzemanyag-fogyasztás és károsanyag-kibocsátás elérése érdekében. Az oxigénszenzor (lambda-szonda) például a kipufogógáz oxigéntartalmát méri, és visszacsatolja az ECU-nak az üzemanyag-levegő keverék pontos beállításához.
Épületautomatizálás (HVAC) és okos otthonok
Az otthonokban és épületekben a kényelem, az energiahatékonyság és a biztonság növelése érdekében alkalmazzák a zárt hurkú rendszereket.
- Hőmérséklet-szabályozás (termosztát): A legklasszikusabb példa. A termosztát méri a szoba hőmérsékletét, összehasonlítja a beállított értékkel, és a fűtési/hűtési rendszert ennek megfelelően kapcsolja be vagy ki, vagy modulálja a teljesítményét.
- Páratartalom-szabályozás: Párásítók és páramentesítők vezérlése a kívánt páratartalom fenntartására.
- Világításvezérlés: A beépített fényérzékelők mérik a természetes fény erősségét, és a mesterséges világítás fényerejét úgy szabályozzák, hogy az mindig a kívánt szinten legyen, energiát takarítva meg.
Orvosi technológia
Az orvosi eszközökben a zárt hurkú szabályozás gyakran életmentő funkciókat lát el, ahol a precizitás és a megbízhatóság kulcsfontosságú.
- Inzulinpumpák: Ezek a rendszerek folyamatosan mérik a vércukorszintet, és automatikusan adagolják az inzulint a beállított célérték fenntartása érdekében.
- Lélegeztetőgépek: Szabályozzák a légzési frekvenciát, a belélegzett levegő mennyiségét és nyomását, figyelembe véve a beteg állapotát.
- Sebészeti robotok: A robotkarok precíz mozgását, a vágási mélységet és az erőkifejtést zárt hurkú rendszerek vezérlik, növelve a műtétek pontosságát és csökkentve az emberi hibalehetőséget.
Energetika
Az erőművek és az energiaelosztó hálózatok komplex vezérlést igényelnek.
- Erőművek: A turbinák fordulatszámának, a generátorok feszültségének és frekvenciájának, valamint a kazánok hőmérsékletének és nyomásának szabályozása mind zárt hurkú rendszerekkel történik az optimális és biztonságos működés érdekében.
- Megújuló energiaforrások: A szélturbinák lapátjainak dőlésszögét vagy a napelemek napkövető rendszerét zárt hurkú szabályozással optimalizálják a maximális energiatermelés érdekében.
Repülés és űrkutatás
Ebben a szektorban a zárt hurkú szabályozás alapvető fontosságú a biztonság és a teljesítmény szempontjából.
- Pilóta nélküli repülőgépek (drónok): A repülési magasság, sebesség, irány és stabilitás fenntartása komplex zárt hurkú rendszerekkel történik, amelyek gyorsulásmérőket, giroszkópokat és GPS-t használnak szenzorként.
- Rakéták és űrhajók: A pályakorrekciók, a stabilitás és a pozícióvezérlés precíziós zárt hurkú rendszerekkel valósul meg, amelyek a legextrémebb körülmények között is megbízhatóan működnek.
Ez a felsorolás is jól mutatja, hogy a zárt hurkú szabályozás mennyire áthatja a modern technológiát, és milyen sokféle területen járul hozzá a hatékonyabb, biztonságosabb és precízebb működéshez.
A zárt hurkú szabályozás tervezési szempontjai és optimalizálása
A zárt hurkú szabályozórendszerek tervezése nem csupán az egyes komponensek kiválasztásából áll, hanem egy komplex mérnöki feladat, amely során számos szempontot figyelembe kell venni a rendszer optimális működésének biztosításához. A cél egy olyan szabályozó megalkotása, amely a kívánt módon reagál, stabil marad, és minimalizálja a hibákat.
Stabilitás biztosítása
A stabilitás a zárt hurkú rendszerek legfontosabb tervezési kritériuma. Egy stabil rendszer a zavaró hatások vagy a referenciajel változása után visszatér az egyensúlyi állapotba, vagy megközelíti azt. Egy instabil rendszer ezzel szemben kontrollálatlanul oszcillál, vagy a kimenete növekvő amplitúdóval tér el a kívánt értéktől, ami károsíthatja a berendezést vagy veszélyeztetheti a folyamatot. A stabilitás elemzésére számos matematikai módszer létezik (pl. Bode-diagram, Nyquist-diagram, Routh-Hurwitz kritérium), amelyek segítenek a szabályozó paramétereinek helyes megválasztásában.
Reakcióidő és túlcsillapítás
A reakcióidő (vagy felfutási idő) azt mutatja meg, mennyi idő alatt éri el a rendszer kimenete a referenciajel értékét egy hirtelen változás (pl. alapjel-ugrás) után. Ideális esetben a rendszer gyorsan reagál, de elengedhetetlen, hogy elkerüljük a túlcsillapítást (overshoot). A túlcsillapítás azt jelenti, hogy a kimenet átmenetileg túllépi a referenciajelet, mielőtt beállna. Bár a gyors reakció kívánatos, a túlzott túlcsillapítás nemkívánatos lehet (pl. egy robotkar túl messzire mozdul el, egy hőmérséklet-szabályozás túlságosan felfűti a rendszert). A szabályozó hangolásával egyensúlyt kell találni a gyorsaság és a túlcsillapítás minimalizálása között.
Állandósult hiba minimalizálása
Az állandósult hiba (steady-state error) az a különbség, ami a referenciajel és a rendszer kimenete között marad, miután a rendszer elérte az állandósult állapotot. Ideális esetben ez a hiba nulla. A PID szabályozó integráló (I) tagja felelős az állandósult hiba megszüntetéséért. A megfelelő I-tag beállítása elengedhetetlen ahhoz, hogy a rendszer hosszú távon is pontosan tartsa a kívánt értéket.
Zajszűrés
A szenzorok által mért jelek gyakran tartalmaznak zajt, amely a rendszer teljesítményét ronthatja, és akár oszcillációkat is okozhat. Ezért a tervezés során gyakran szükség van digitális vagy analóg zajszűrőkre. Ezek a szűrők eltávolítják a magas frekvenciájú zajkomponenseket a szenzorjelből, mielőtt az a szabályozóhoz kerülne. A szűrés azonban késleltetést is bevezethet, ezért gondosan kell kiválasztani a megfelelő szűrőparamétereket, hogy ne rontsuk a rendszer reakcióidejét.
A szabályozó hangolása (PID paraméterek)
A PID szabályozó paramétereinek (Kp, Ki, Kd) hangolása (tuning) az egyik legkritikusabb és leggyakoribb feladat a zárt hurkú rendszerek tervezése és optimalizálása során. A helyes hangolás biztosítja a stabilitást, a gyors reakciót és a minimális állandósult hibát. Számos módszer létezik a PID paraméterek beállítására:
- Ziegler-Nichols módszer: Egy klasszikus empirikus módszer, amely a rendszer oszcillációs viselkedéséből indul ki.
- Relé módszer: Automatikus hangolási eljárás, amely egy relé segítségével gerjeszti a rendszert.
- Szoftveres szimuláció és optimalizáció: Szimulációs környezetek (pl. MATLAB/Simulink) segítségével modellezik a rendszert, és algoritmusokkal optimalizálják a PID paramétereket.
- Kézi hangolás: Tapasztalaton alapuló, iteratív folyamat, amely során a mérnök manuálisan állítja a paramétereket, figyelve a rendszer viselkedését.
A megfelelő hangolás elengedhetetlen a rendszer optimális teljesítményéhez, és gyakran kompromisszumot igényel a különböző teljesítménycélok (gyorsaság, stabilitás, pontosság) között.
A zárt hurkú szabályozórendszerek tervezése tehát egy iteratív folyamat, amely magában foglalja a rendszer modellezését, a szabályozó kiválasztását és hangolását, valamint a tesztelést és az optimalizálást. A modern eszközök és technikák jelentősen megkönnyítik ezt a folyamatot, lehetővé téve a mérnökök számára, hogy egyre komplexebb és kifinomultabb vezérlőrendszereket hozzanak létre.
A jövő zárt hurkú szabályozórendszerei: intelligencia és adaptivitás
A zárt hurkú szabályozórendszerek fejlődése a technológiai innovációk élvonalában halad, és a jövőben még inkább intelligenssé és adaptívvá válnak. A mesterséges intelligencia, a gépi tanulás és a hálózati technológiák integrációja új dimenziókat nyit meg a vezérléstechnikában, lehetővé téve a rendszerek számára, hogy még hatékonyabban, autonómabban és robusztusabban működjenek.
Mesterséges intelligencia és gépi tanulás az automatizálásban
A mesterséges intelligencia (MI) és a gépi tanulás (ML) algoritmusok forradalmasítják a szabályozástechnikát. Hagyományosan a szabályozókat előre megtervezett matematikai modellek alapján fejlesztik ki. Az MI és ML viszont lehetővé teszi, hogy a szabályozók tanuljanak a tapasztalatokból.
- Neurális hálózat alapú szabályozók: Ezek a szabályozók képesek komplex, nem-lineáris rendszerek viselkedését megtanulni, és finomhangolt beavatkozásokat generálni. Különösen hasznosak ott, ahol a folyamat matematikai modellje nehezen írható le.
- Megerősítéses tanulás (Reinforcement Learning): Ebben az esetben a szabályozó egy „jutalom” vagy „büntetés” rendszer alapján tanulja meg a legoptimálisabb beavatkozásokat, anélkül, hogy explicit modellre lenne szüksége a folyamatról. Ez rendkívül hasznos lehet olyan komplex, dinamikus környezetekben, mint a robotika vagy az autonóm járművek.
Az MI-alapú szabályozók képesek adaptálódni a változó környezeti feltételekhez, a rendszer elhasználódásához vagy a terhelés ingadozásaihoz, önmagukat optimalizálva a legjobb teljesítmény eléréséhez.
Adaptív szabályozás
Az adaptív szabályozórendszerek képesek dinamikusan módosítani saját paramétereiket a rendszer vagy a környezet változásainak függvényében. Míg a hagyományos PID szabályozó paraméterei fixek, az adaptív szabályozók folyamatosan becslik a szabályozott folyamat aktuális jellemzőit, és ennek megfelelően módosítják a szabályozási algoritmus beállításait.
- Ez lehetővé teszi, hogy a rendszer optimálisan működjön széles működési tartományokban, és hatékonyan kezelje a nem-linearitásokat vagy az időben változó paramétereket.
- Például egy repülőgép vezérlőrendszerének alkalmazkodnia kell a különböző magassági és sebességi viszonyokhoz, ahol a levegő sűrűsége és a repülési dinamika jelentősen eltér.
Prediktív vezérlés (Model Predictive Control – MPC)
A prediktív vezérlés (MPC) egy fejlettebb zárt hurkú szabályozási stratégia, amely a rendszer jövőbeli viselkedését próbálja megjósolni egy matematikai modell segítségével. Az MPC szabályozó optimalizálja a beavatkozásokat egy adott időhorizontra előre, figyelembe véve a rendszer korlátait és a kívánt célokat.
- Ez a módszer különösen hatékony komplex, több bemenetű és több kimenetű rendszerek (MIMO rendszerek) szabályozásában, ahol a cél nem csupán egy referenciajel követése, hanem például az energiafogyasztás minimalizálása, a termékminőség optimalizálása vagy a biztonsági korlátok betartása.
- Az MPC alkalmazása elterjedt a vegyiparban, az olaj- és gáziparban, valamint az energetikában.
IoT és felhőalapú rendszerek
Az Internet of Things (IoT) és a felhőalapú számítástechnika új lehetőségeket teremt a zárt hurkú szabályozórendszerek számára.
- Elosztott érzékelés és vezérlés: Az IoT eszközök hálózata hatalmas mennyiségű adatot gyűjthet a környezetről és a folyamatokról, lehetővé téve a globális, elosztott zárt hurkú rendszerek kialakítását. Például egy okos városban a forgalom, a levegőminőség és a közvilágítás szabályozása egyetlen, integrált rendszeren keresztül történhet.
- Felhőalapú adatfeldolgozás és MI: A felhő biztosítja a szükséges számítási teljesítményt az MI/ML algoritmusok futtatásához és az adaptív szabályozók optimalizálásához, még a helyi hardverkorlátokkal rendelkező IoT eszközök esetében is.
- Távfelügyelet és karbantartás: A felhőn keresztül a rendszerek távolról felügyelhetők és karbantarthatók, optimalizálhatók, csökkentve az üzemeltetési költségeket és növelve a megbízhatóságot.
A jövő zárt hurkú szabályozórendszerei tehát nem csupán a beállított értéket fogják tartani, hanem proaktívan optimalizálják működésüket, alkalmazkodnak a változó körülményekhez, és intelligens döntéseket hoznak, hogy még hatékonyabbá, biztonságosabbá és fenntarthatóbbá tegyék a modern világot. Ez a fejlődés alapjaiban változtatja meg az ipari folyamatokat, a közlekedést, az egészségügyet és mindennapi életünket.